File:Binning and decimation workflow schema for point clouds.png
Jump to navigation
Jump to search
Size of this preview: 800 × 296 pixels. Other resolution: 2,613 × 966 pixels.
Original file (2,613 × 966 pixels, file size: 127 KB, MIME type: image/png)
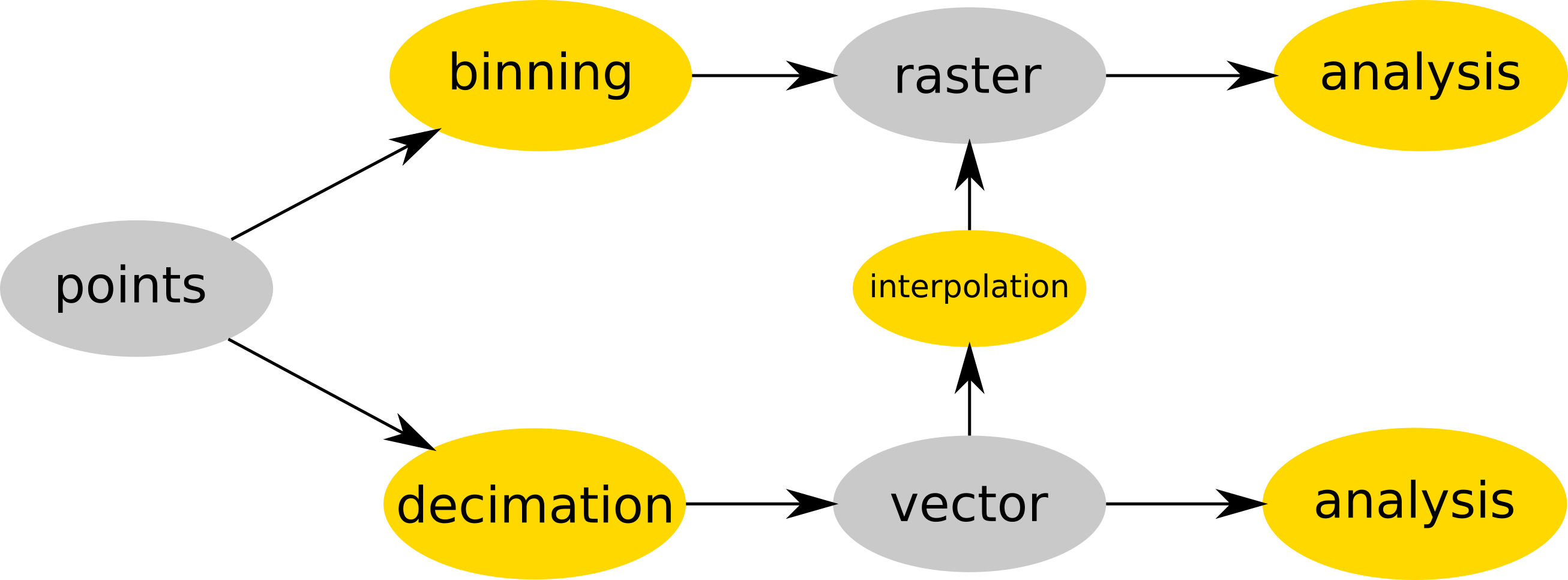
Point cloud is either binned into a raster map (e.g. r.in.lidar) and then analyzed (as raster) or (optionally) decimated (e.g. v.in.lidar), converted to vector map and then interpolated (e.g. v.surf.rst) into raster or analyzed as vector map (e.g. v.vect.stats).
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 15:17, 19 July 2017 | 2,613 × 966 (127 KB) | ⚠️Wenzeslaus (talk | contribs) | Point cloud is either binned into a raster map (e.g. r.in.lidar) and then analyzed (as raster) or (optionally) decimated (e.g. v.in.lidar), converted to vector map and then interpolated (e.g. v.surf.rst) into raster or analyzed as vector map (e.g. v.ve... |
You cannot overwrite this file.
File usage
The following 2 pages use this file:
{kind=link}